Bei einem kontrollierten Stopp wird die Antriebsbewegung schrittweise zum Stillstand gebracht. Der Servoverstärker sendet Drehzahl=0 zum Motor. Der Motor bremst entsprechend dem vorgeschriebenen Verzögerungswert (CS.DEC ).
Ein kontrollierter Stopp kann auf drei Wegen erfolgen:
- Der Benutzer konfiguriert einen programmieren Digitaleingang mit Hilfe von DINx.MODE auf Modus 13. Bei Anwendung von DIN1.MODE 13 beispielsweise wird Digitaleingang 1 auf kontrollierten Stopp gesetzt.
- Eine Steuerung bzw. der Benutzer (über das WorkBench Terminal-Fenster) initiiert einen Befehl zur Deaktivierung der Software (DRV.DIS).
- Ein Fehler führt zu einem kontrollierten Stopp durch den Servoverstärker. Fehler, die einen kontrollierten Stopp auslösen: siehe Fehler und Warnmeldungen.
Der Mechanismus für kontrollierten Stopp wird in folgenden Fällen aktiviert:
- DRV.DISMODE = 2 und der Benutzer führt den Befehl DRV.DIS über das Terminal aus oder verwendet die Deaktivierungs-Schaltflächen in WorkBench.
-
-
Sie müssen den Servoverstärker deaktivieren, um DRV.DISMODE einstellen zu können.
- DRV.DISMODE = 2 und der Benutzer führt über einen an den Servoverstärker angeschlossenen Feldbus den Befehl DRV.DIS aus.
- EIn Fehler ist aufgetreten, der einen kontrollierten Stop (CS) hervorruft. Nach Ausführung des CS-Befehls wird der Servoverstärker deaktiviert.
- Ein digitaler Eingangsmodus (DINx.MODE) wird auf 13 gesetzt. Bei einer Änderung des digitalen Eingangsstatus (aktiv „High“ oder aktiv „Low“, je nach Wert von DINx.INV), wird der kontrollierte Stopp ausgeführt und der Servoverstärker anschließend deaktiviert.
- HW oder SW Endschalter:
Konfiguration:
HW Endschalter können über einen digitalen EIngang und Modus 18 oder 19 konfiguriert werden. (Siehe auch DINx.MODE.)
SW Endschalter können mit den Parametern SWLS.LIMIT0/SWLS.LIMIT1 konfiguriert werden.
Aktivierung:
Wenn ein HW oder SW Endschalter betätigt wird, stoppt die Bewegung mit einem kontrollierten Halt. Der Antrieb wird nach Ausführung des kontrollierten Halt NICHT automatisch deaktiviert, sondern es wird eine Warnung (n107 / n108) ausgegeben, dass ein HW / SW-Endschalter betätigt wurde, und der Antrieb bleibt aktiviert. Der Parameter DRV.DISTO ist nicht aktiv. Nur eine befohlene Bewegung, die den Endschalter deaktiviert, ermöglicht den normalen Betrieb und entfernt die Endschalterwarnung.
- Ab einer Firmwareversion M_01-18-05-000 kann die SW Endschalter Warnung so konfiguriert werden, dass ein Fehler erzeugt und der Frequenzumrichter deaktiviert wird (siehe FAULT107.ACTION und FAULT108.ACTION).
Nutzen Sie die CS-Parameter des Servoverstärkers wie folgt zur Konfiguration eines kontrollierten Stopps:
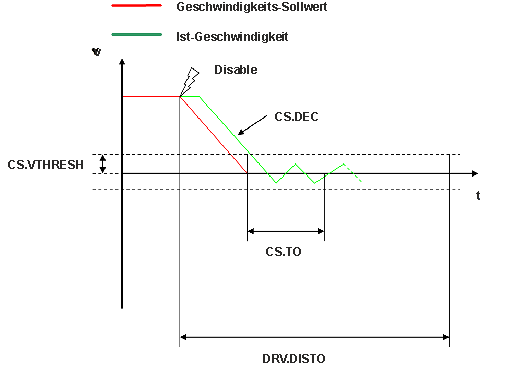
- CS.DEC: Für die Deaktivierung verwendete Verzögerungsrampe.
- CS.VTHRESH: Schwellwert für Nulldrehzahl. Die Motorwelle gilt als gestoppt, sobald die Ist-Drehzahl (gefiltert durch einen 10 Hz-Filter, z. B. VL.FBFILTER) innerhalb von ± CS.VTHRESH liegt.
- CS.TO: Zeit für Nulldrehzahl. Die Ist-Drehzahl muss über den Zeitraum CS.TO hinweg innerhalb von 0 ± CS.VTHRESH liegen, bevor der Servoverstärker den kontrollierten Stopp durchführt. Dieser Wert wird verwendet, weil der Motor je nach Verstärkungen, Verzögerungsrampe, Motorträgheitsmoment usw. über das VEL0-Fenster hinausschießen kann.
- DRV.DISTO: Timeout für Deaktivierung. Dieser Parameter legt eine umfassende, unabhängige Funktionsprüfung dahingehend fest, ob der Servoverstärker den deaktivierten Zustand erreichen kann. Wenn das in Schritt 3 eingestellte Zeitfenster für Nulldrehzahl (VEL0) zu klein ist, erreicht der Servoverstärker möglicherweise niemals das Ende des kontrollierten Stoppprozesses. In diesem Fall kann der Servoverstärker nach Ablauf von DRV.DISTO deaktiviert werden, selbst dann, wenn der kontrollierte Stopp nicht abgeschlossen ist.
Diagramm für kontrollierten Stopp
Zugehörige Parameter und Befehle
CS.STATE : Liest den aktuellen Status des kontrollierten Stoppprozesses.(0 = Es erfolgt kein kontrollierter Stopp. 1 = Es erfolgt ein kontrollierter Stopp).
Zugehörige Themen:







